Просто несколько мыслей.
1. Нет требований к форме лодки, так что она может быть сферической или кубической. При такой форме лодка будет быстро останавливаться после выключения мотора, а значит управлять будет проще.
2. Совместить киль с рулём направления (поворачиваться может весь киль). Для настоящей лодки это неудобно, а для модели нормально. Такая схема позволит уменьшить радиус поворота.
3. Рассмотреть вариант аэровинта в качестве двигателя. Чуть было не назвал это аэроглиссером, но глиссер - это скоростное судно с малой осадкой, так что термин был бы неправильный. И это несовместимо с пунктом 1, т.к. при сферической форме и воздушном винте будет нечто крайне неустойчивое. В этом случае подойдёт традиционная форма лодки.
4. (Если бы у меня было такое задание, то я бы остановился на этом варианте). В качестве движителя - два
гребных колеса - с правого и левого борта, каждое на отдельном моторе. Руль вообще не требуется,
возможен разворот на месте при движении колёс в противоположные стороны. Схема с самым простым управлением - по сути, это водный аналог гусеничного трактора или танка.
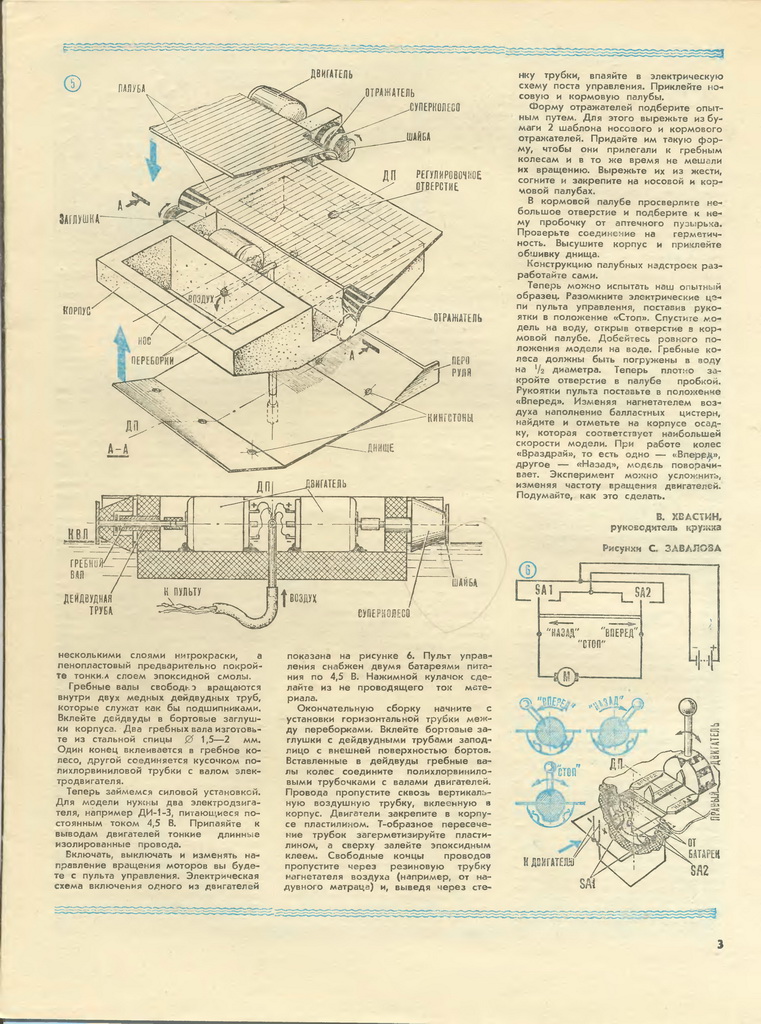
И небольшая экскурсия в 1986 год:
1 2
2